
Ian J. Latchmansingh
Human-Centric Design Leader & Technologist in NYCProcedural Terrain Generation for Robotics Simulation and Machine Learning
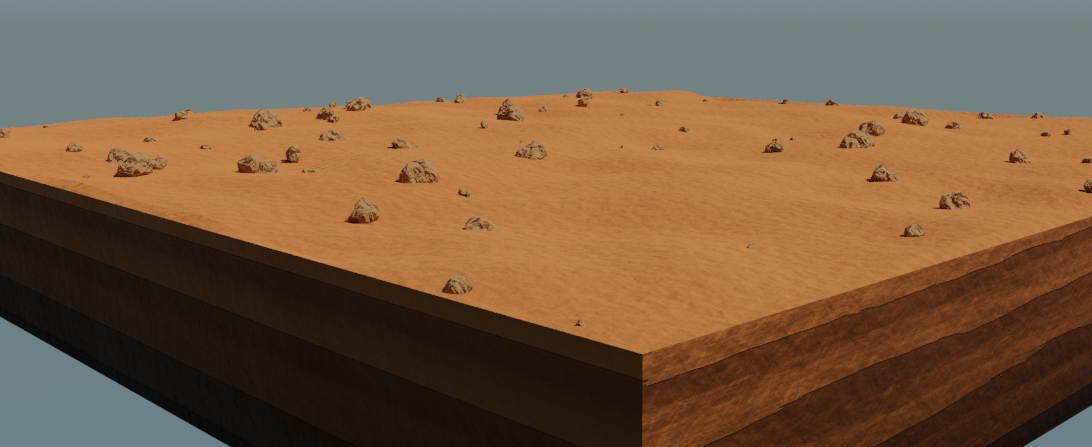
These terrain generators were initially developed for the AWS JPL (yes, that Jet Propulsion Laboratory) Open Source Rover Challenge. This was a virtual hackathon that challenged contestants to improve how rovers on Mars may operate on the unpredictable terrain.
This design is a fully-procedural particle system that can:
This was later repurposed to act as an environment generator for office enviroments as well.
![]()
![]()
![]()
This design is a fully-procedural particle system that can:
- distort the surface
- scatter obstacles of varying complexity, size, and frequency
- dynamically set the rover origin point to a flat, transitional surface
This was later repurposed to act as an environment generator for office enviroments as well.
©MMXXI
Perfection is achieved, not when there is nothing more to add, but when there is nothing left to take away.