
Ian J. Latchmansingh
Human-Centric Design Leader & Technologist in NYCProcedural Terrain Generation for Robotics Simulation and Machine Learning
Synthetic Spatial Data
Synthetic Spatial Data
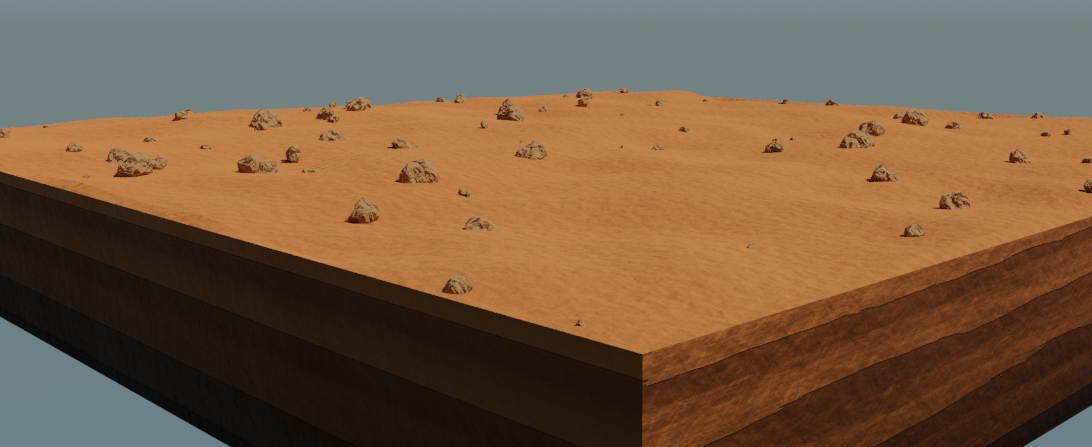
Terrain generators were initially developed for the AWS + JPL (Jet Propulsion Laboratory) Open Source Rover Challenge. This was a virtual hackathon that challenged contestants to improve how rovers on Mars may operate on the unpredictable terrain. This design is a fully-procedural particle system that can: distort the surface, scatter obstacles of varying complexity, size, and frequency, and dynamically set the rover origin point to a flat, transitional surface.
©MMXXI
Perfection is achieved, not when there is nothing more to add, but when there is nothing left to take away.