
Ian J. Latchmansingh
Human-Centric Design Leader & Technologist in NYCIoT Provisioning, Monitoring, and Maintenance for Light & Wonder
Functional Prototype
Functional Prototype






Network monitoring and repair application for an electronic gaming manufacturer. Enables technicians to identify, queue, procure parts for, and provision devices on-site through sensors for predictive maintenance. Reduces wasteful service visits by 90%.
AWS Blog Post
AWS Innovation Ambassadors Podcast
AWS Blog Post
AWS Innovation Ambassadors Podcast
Filed under:
IoT
IoT
Autonomous Material Delivery for Just-In-Time Manufacturing
Functional Prototype
Functional Prototype
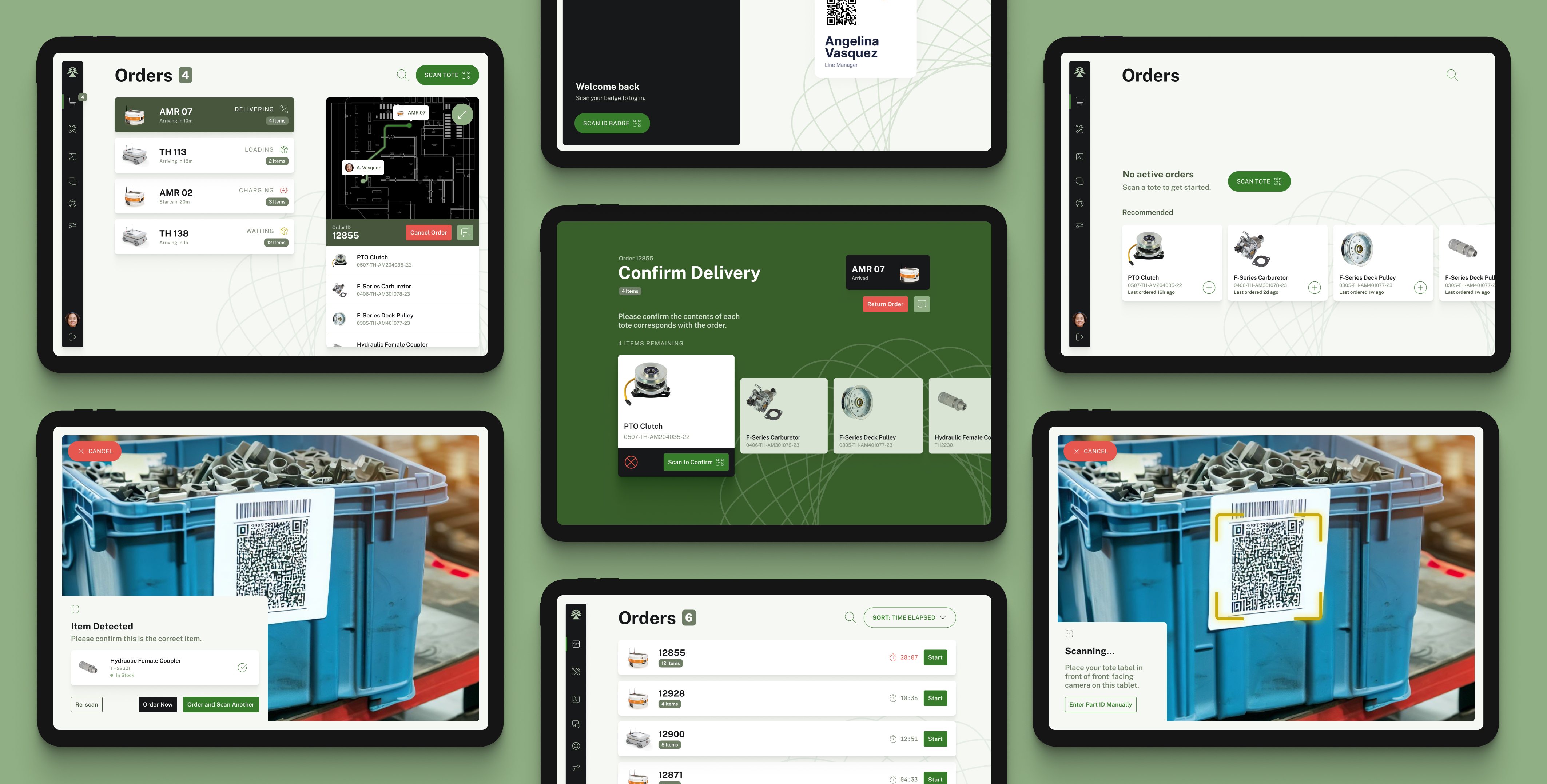

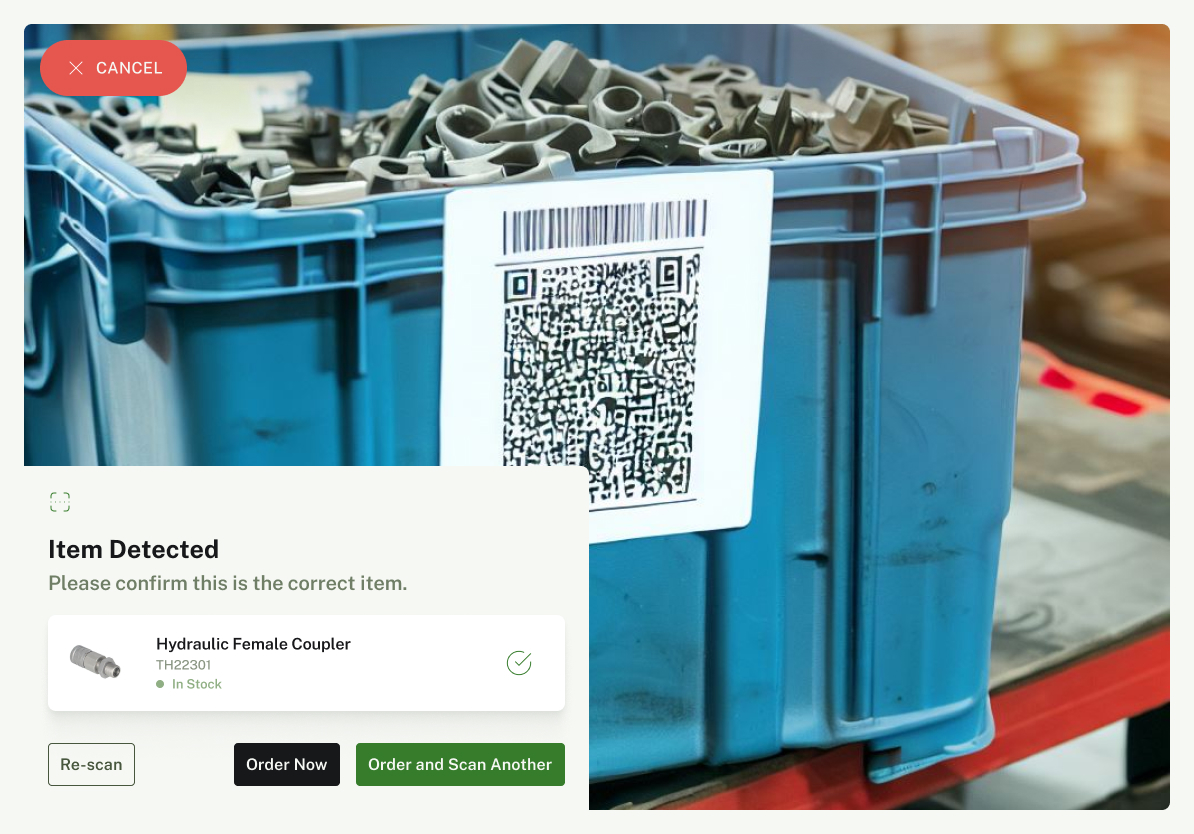



Facing a labor shortage due to a lack of licensed forklift drivers, I worked with an industrial agricultural manufacturer to support cobot orchestration for material fulfillment from a centralized warehouse (“Marketplace”) to transport parts via Autonomous Mobile Robots (AMRs) to workstations in an assembly line.
Broadcast Monitoring using Machine Learning and Computer Vision
Functional Prototype
Functional Prototype
Functional Prototype
Functional Prototype
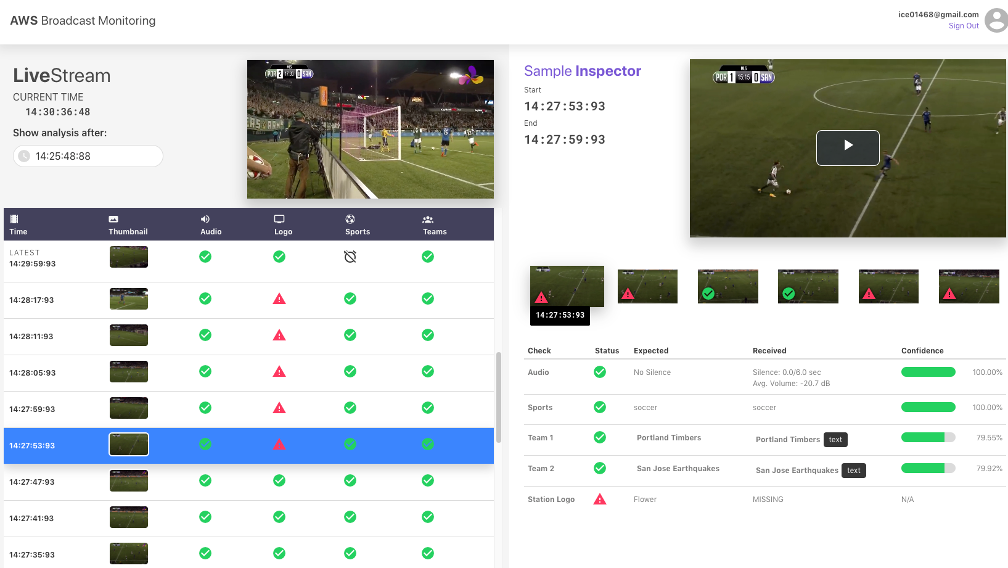
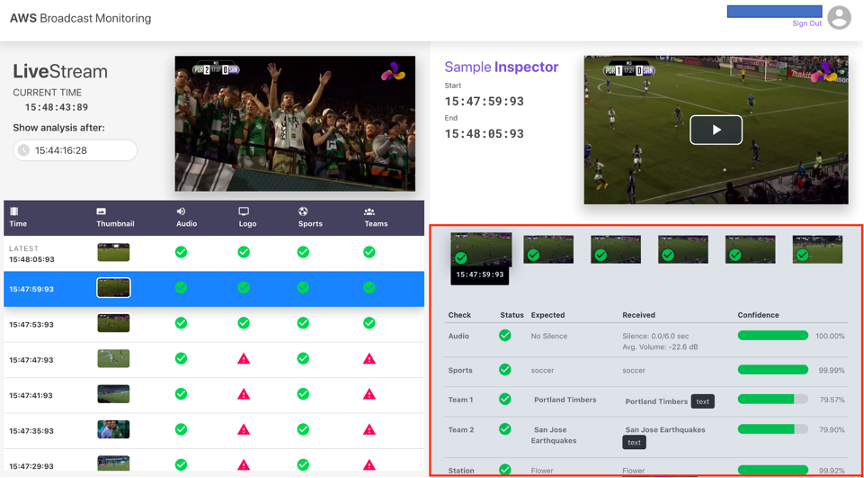
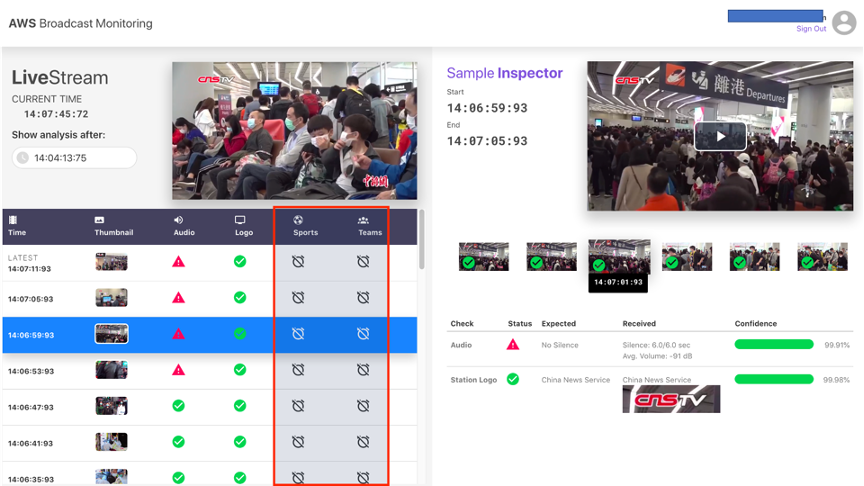
This solution allows for the automation of lower-level broadcast monitoring quality checks like audio and video anomalies that were previously manual chores. This enables human workers to focus on higher-level tasks, take action sooner, and handle a higher volume of channels without sacrificing efficacy.
AWS for M&E: Broadcast Monitoring Architecture and Design
AWS for M&E: Broadcast Monitoring Architecture and Design
Contextual Augmented Reality Interfaces for the Internet of Things
Proof of Concept
Proof of Concept



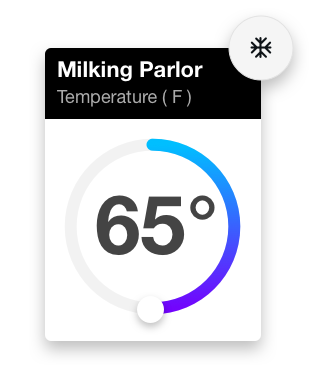
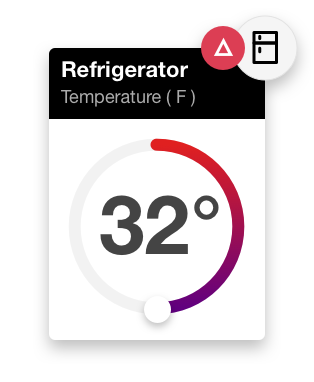



Visualizing and manipulating IoT devices in a singular, contextual, spatial interface. I worked with Ramin Firoozye︎︎︎ to craft a UI prototype for what his ARIoT concept would look like in practice. The results of which were revealed at AWS Reinvent 2019.
Procedural Terrain Generation for Robotics Simulation and Machine Learning
Synthetic Spatial Data
Synthetic Spatial Data
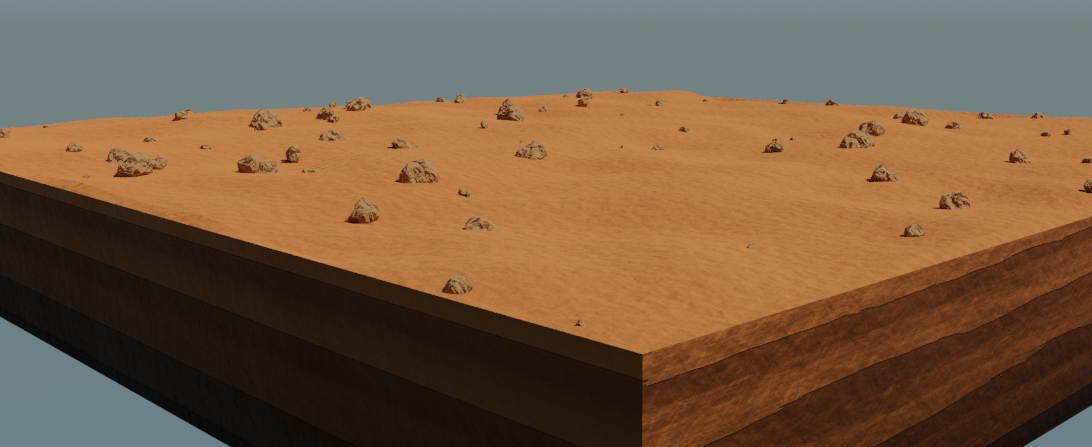
Terrain generators were initially developed for the AWS + JPL (Jet Propulsion Laboratory) Open Source Rover Challenge. This was a virtual hackathon that challenged contestants to improve how rovers on Mars may operate on the unpredictable terrain. This design is a fully-procedural particle system that can: distort the surface, scatter obstacles of varying complexity, size, and frequency, and dynamically set the rover origin point to a flat, transitional surface.
©MMXXI
Perfection is achieved, not when there is nothing more to add, but when there is nothing left to take away.